Bayesian optimization with switching cost: Regret analysis and lookahead variants
Abstract
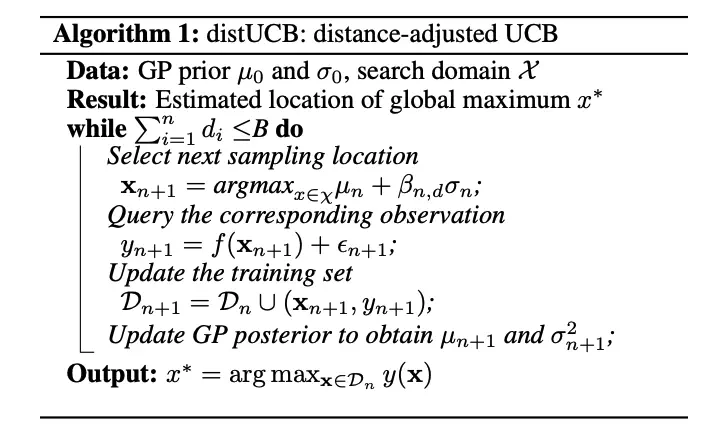
Bayesian Optimization (BO) has recently received increasing attention due to its efficiency in optimizing expensive-to-evaluate functions. For some practical problems, it is essential to consider the path-dependent switching cost between consecutive sampling locations given a total traveling budget. For example, when using a drone to locate cracks in a building wall or search for lost survivors in the wild, the search path needs to be efficiently planned given the limited battery power of the drone. Tackling such problems requires a careful cost-benefit analysis of candidate locations and balancing exploration and exploitation. In this work, we formulate such a problem as a constrained Markov Decision Process (MDP) and solve it by proposing a new distance-adjusted multi-step look-ahead acquisition function, the distUCB, and using rollout approximation. We also provide a theoretical regret analysis of the distUCB-based Bayesian optimization algorithm. In addition, the empirical performance of the proposed algorithm is tested based on both synthetic and real data experiments, and it shows that our cost-aware non-myopic algorithm performs better than other popular alternatives.
Supplementary notes can be added here, including code, math, and images.
Qiyu Wei 魏启宇
Ph.D student.
My research interests include AI in Semiconductor, 3D Deep Learning and Bayesian Optimisation.