Towards Efficient Point Cloud Classification via Critical Point Aware Pooling with Adaptive Learnable Threshold
Abstract
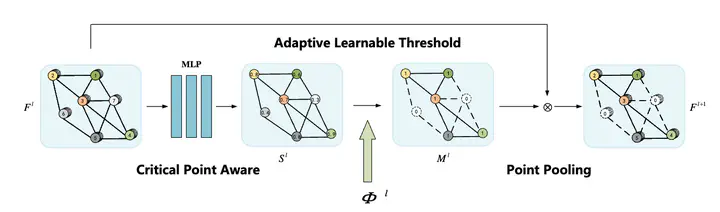
LWith the rapid development of our transportation systems that has brought a great deal of convenience in our daily life, automatic driving has been becoming popular. Point clouds offer unparalleled advantages as 3D data in sensing the surrounding environment. However, a Down-Sampling method for point clouds is urgently demanded because point cloud datasets are usually huge and impose a great computational burden on edge computing platforms, such as automobiles. In this work we propose a Critical Point Aware Pooling (CPAPool) method with learnable thresholds. It adaptively learns the importance of nodes in point cloud data and scores them, followed by pooling the point cloud data according to learnable thresholds. This method uses only the important points in the point cloud to participate in the calculation process while effectively improving the classification performance of the existing architectures, which can be easily embedded with CPAPool. We have conducted experiments on the ModelNet10 and ModelNet40 datasets and demonstrated that our proposed method effectively reduces the number of computation points involved, resulting in better accuracy and significant improvement in inference speed.
Supplementary notes can be added here, including code, math, and images.
Qiyu Wei 魏启宇
Ph.D student.
My research interests include AI in Semiconductor, 3D Deep Learning and Bayesian Optimisation.